

The author performing a grid search very near the burial location.
What follows is my range set up, some notes and illustrations for newbies to understand basic terminology and concepts, and my general procedures. From an overall perspective, I’m just going through some predefined motions to test limits. In terms of the real important stuff, reliability and ergonomics are the bigger factors to consider. When I say reliability I don’t mean it will always work, but how well it recognizes, distinguishes, and holds on to the signal(s) it is receiving. As for the latter, there’s no way to test intuitiveness without somebody’s ass being on the line. I give it my best guess based on 20 years explaining these devices.
The Setup
One of the important aspects of testing any product are the conditions it is tested under. With avalanche transceivers it might seem more appropriate to test in snow, on a slope, but all that is really needed is an area that is void of electrical interference.
Electrical background noise
How the eye-in-the-sky views the beacon range for EYT.
Physical Characteristics
The range is moderately wooded with fir, Ponderosa and Lodgepole pines. Ground cover is a mix of sage brush, mules ears, and weeds. Even though trees should be transparent at 457 kHhz, my experience says they do affect the response of signals a little bit, but not in a way that wouldn’t be likely in a real avalanche rescue situation.
Orientation based Reception
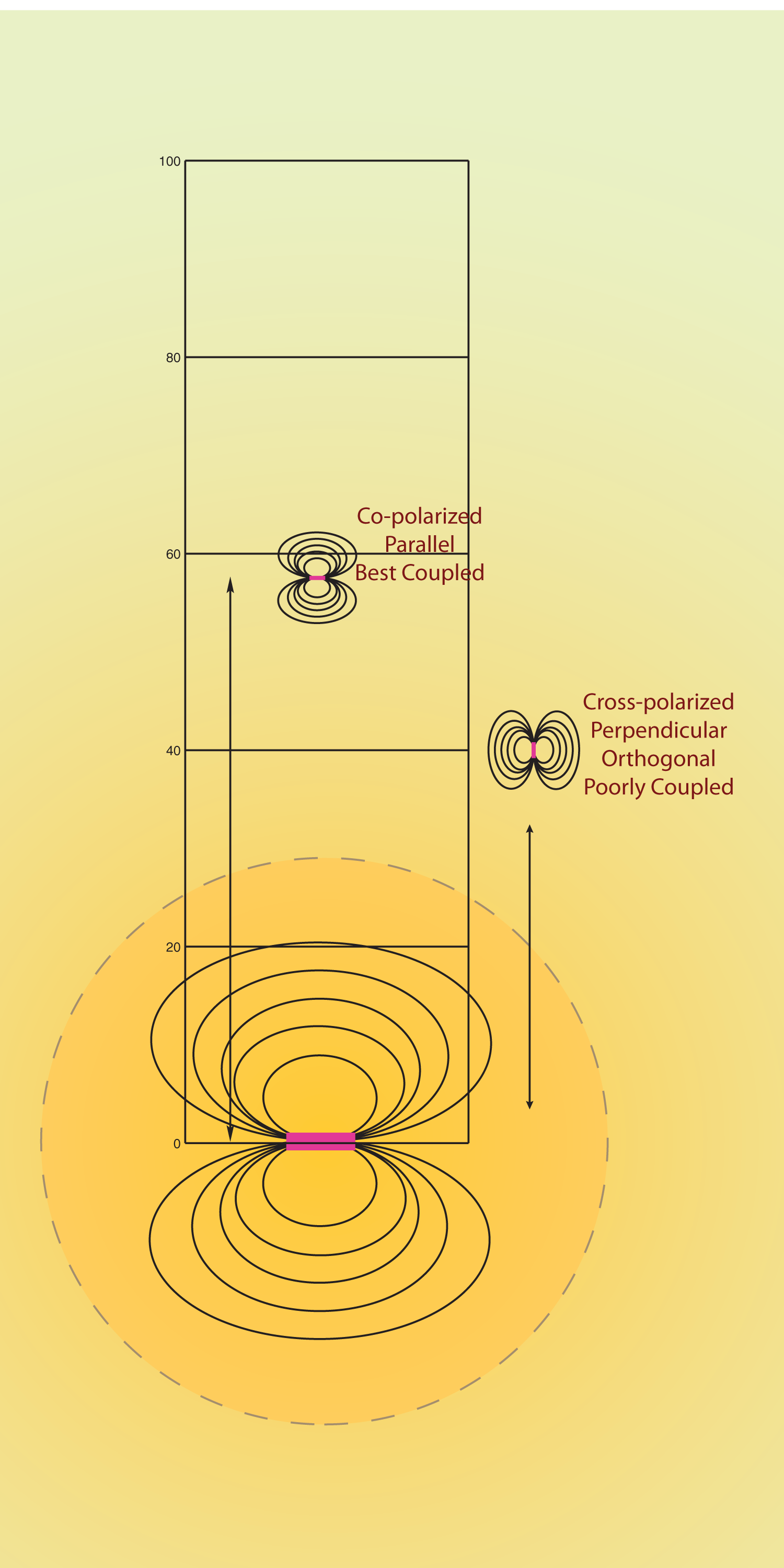
Magnetic view of the range and what is meant by relative orientation between transmit and receive beacons.
Recording Response
Accuracy is determined by the difference between the actual measured between transmit and receive beacons, and the value displayed by the receiver. One phenomenon observed with all digital beacons is variation in successive displays that show the distance changing, even if the receive beacon is held still. This variation is called “bounce”, for the way the numbers go up and down. The bounce is generally a percentage of the distance away, so the bounce become less evident as you get closer.
All models over-estimate distance under 10 meters, but at that point the curvature of the field lines is being shown and IS greater than the straight line distance.
click to enlarge
Signal Detection VS Identification
Each beacon shows minor differences in how they indicate they have confirmed the presence of a signal. They all exhibit a difference between merely sensing a signal, momentarily, and recognizing it in such a way that it is able to consistently update the screen in an ongoing basis with distance and direction. The latter criteria is used to determine a reliable, maximum range, not merely the ability to sense a signal sporadically.
Scenarios
Basic victim scenarios that progressively challenge digital avy beacons.
Due to the consistency of the range and set up configurations it is possible to review a beacon “solo” but I find it more helpful to run two or three different beacons through the paces so I refresh my memory with the relative differences between them. This makes it much easier to say whether a particular beacon exhibits more “bounce” than another model, has a faster or slower response time, and how well it responds in a multiple victim scenario with regard to marking and/or signal separation.
© 2014
2 pings
[…] Posts Review: Arva Neo v1 Bouncing Avy Beacons Home on the Range: How this test was performed BackcountryTalk: Beacon BBQ […]
[…] 2012 Pieps DSP review Bouncing Avalanche Beacons EYT Test Range for Avalanche Tranceivers […]