
I stand in my workshop hacksaw in hand, old tele boots strewn about the floor. A pair of old gara’s sit on the work bench surrounded by plastic shavings with a freshly cut gash through the bellows. Am I a deranged AT skier acting out every Tele skiers worst nightmare? Of course not, I’m a deranged Tele skier chasing my own dream, but how did I end up here? What am I doing? Let me explain…

My Homebrew TTS binding
I recently mocked up my own version of the TTS binding in my workshop. I spent some time skiing and studying my TTS and other bindings and came to some interesting conclusions about the flaws in the current telemark boot/binding interface as well as modern technique that lead to where I am today.
I took the binding out for it’s shakedown cruise a few weekends ago. Day one it was like making tele turns on an AT binding. I am using the first generation Scarpa TX boots and the stiffness along with a somewhat soft spring in my heel tube made it impossible to break the boot at the bellows. After day 1 I poured some boiling water in the toes of my boots and flexed them for a while. Day 2 I was able to get the ball of my foot down and start making some “real” telemark turns.
The lighter springs in my binding and free pivot at the toe made it really easy to roll up on the boot toe without lots of attention to rear foot weighting. If I kept my stance tight and tall I was able to keep the ball of my foot firmly on the ski but any bit of a deep tele turn (even a compact one) and up on the toes I would go. So I started looking over the system and boot binding interface and things immediately became apparent. With a locked cuff on a modern plastic tele boot it is impossible to do a “deep” tele turn and keep the ball of the foot on the ski. Whether you are on a 75mm binding, NTN binding, TTS binding, anything, it just can’t be done. Let’s take a quick look at why.
Dostie took the perfect picture of the problem and commented on it briefly in his TTS review so we’ll look at that for reference.
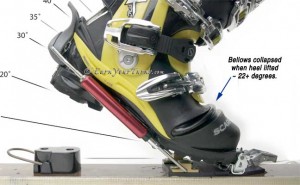
TTS with a fully compressed bellows on TX-Pro Click to enlarge.
His picture shows it perfectly, at 22 degrees of heel lift the bellows of the boot are completely collapsed and the ball of the foot is already off the ski. Maybe I’m wrong but I’d say that’s about as tall as a tele stance gets, drop your knee much further and where do you go? Well there’s two options. Option one, now that the bellows are collapsed you roll up on the toe (the TTS shows it the best but all bindings are guilty of it to some extent). Option two you flex your ankle and are able to get lower and still keep the ball of the foot on the ski. But if the cuff on your boot is locked, there is no option two. So here you are trying to make proper “ball of foot” weighted tele turns but if you lift your heel any more than is required for a very tall tele turn the ball of the foot rises up off the ski.

Testing the limits of BOF contact
So next I took an angle gauge and decided to check and see what my foot was capable of in a pair of leather shoes. The gauge read right around 45 degrees of heel lift. So in a modern tele boot if we can lift our heel at most 22 degrees before we loose ball of foot contact with the ski we are loosing half of the heel lift our body is capable of. Something doesn’t seem right here.
So I posed this question on telemarktips: How does one drive a tele ski with the ball of their foot in a deep tele turn? Cesare had the answer, he pointed out that it was still possible to generate ball of foot pressure once the ball of foot had lifted off the ski just no longer through a direct transfer of forces. Once the sole of the boot under the ball of the foot has lifted off the ski, pressure from the ball of the foot is transmitted into the boot sole and to the ski through a sort of bridge created by the boot sole and binding. For the sake of discussion I am calling this the “virtual ball of foot concept”
Further looking at the “virtual ball of foot concept” I realized this is what I’ve been doing for years and it greatly explained the need for active bindings and stiff springs. In order to create a strong virtual platform you need a firm hold on the duckbill and an active binding with lots of spring pressure. This setup obviously is working but is it the best way? If you look closely at the system in a deep tele turn you are now transferring all your driving forces to the ski through a torsionally weak heel connection and a very small surface area on the tip of the boot. We try to compensate for this problem by continually trying to design torsionally stiffer boots. These boots are wonderful developments but ultimately seem like a band aid on a larger problem . The problem has been addressed from other angles as well such as adding a rigid plate (bomber, linken, etc) or grabbing the boot at the duck butt to shorten the bridge (NTN). These ideas all stiffen the system but again seem like a band aid on a larger problem.
So rather than throw band aids at the problem why not address the problem at the source. I think what we need is to be able to transfer forces from the foot to the ski over a broader platform while still in a lower stance. Have the foot more solidly planted on the ski. Skiing tall with the ball of foot firmly planted on the ski I can feel the power you can put to the edges through driving down through the ball of the foot into the ski. I want to accomplish this connection and feel in a deeper turn.
Maybe there are factors within boot design such as toe crunch or material limitations that simply make it so no further range of motion can be incorporated into the boot. I’d love to sit down with the engineers from Garmont, Scarpa, Crispi or BD and find out if their is a reason behind the design. Was the angle decided upon back when the original Terminator was built and has just always remained the golden standard? Have designers tried to push the limits further but hit limitations? Is approximately 20 degrees really the optimal flex for a boot and anything more is unskiable for reasons not apparent to me?
Adding more range of motion into the boot would seem to me to further remove the boot from the “how it skis equation”. The concept I’ve heard tossed around a lot with NTN is to make the bellows of the boot very soft so the feel of the system is adjusted with the binding itself not the boot. Well what if we added another 10 degrees of travel to the boot bellows could we not further this concept and be able to dial in a boot binding combination for a knee to skier and a tall skier all on the same binding by simply changing the spring rate and preload? Could a boot with more bellows travel still work well for skiers that prefer a tall stance yet also improve the experience for those who like to get lower? Maybe I’m chasing a Pink Elephant with wings but I have a hacksaw and a pile of old boots and I plan to find out.
4 pings